Worked on a
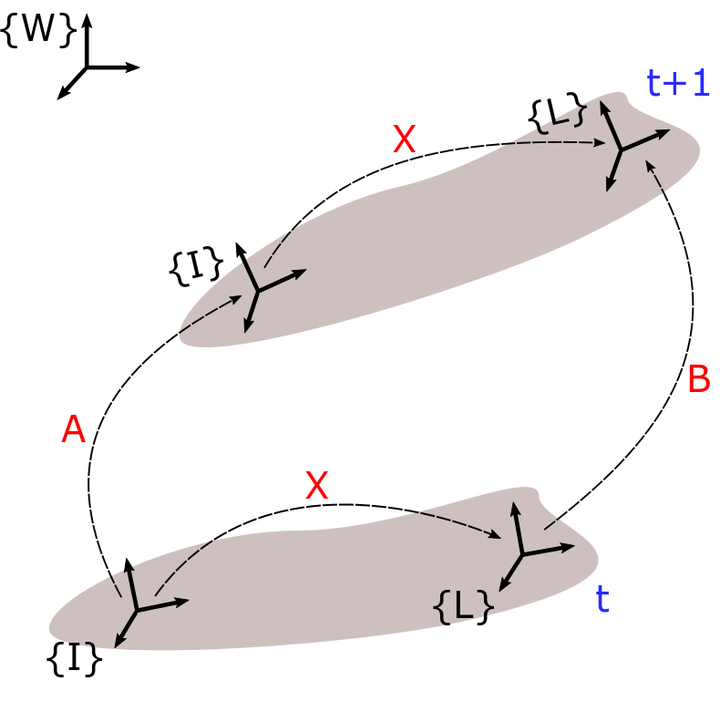
6 DOF non-linear optimization problemto determine the pose vector relating an Inertial Measurement Unit (IMU) to a LiDAR sensor based on the data collected on Zeus self-driving car during its operation.View a cool video of LiDAR point clouds: